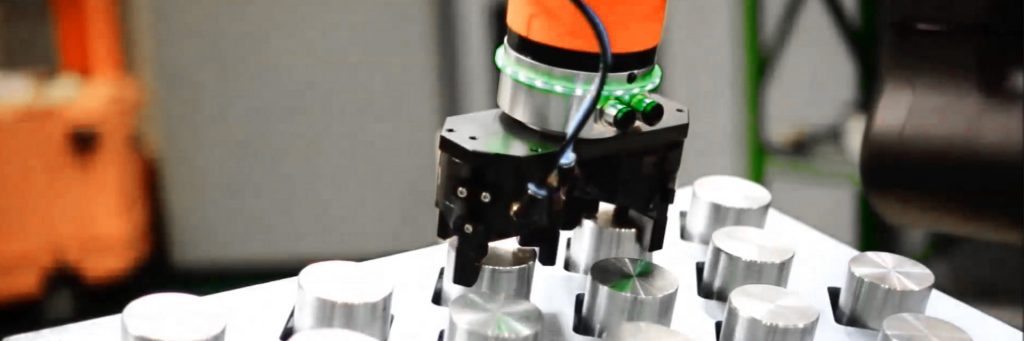
At random oppakken
Hanwha heeft als uitbreiding voor de HCR-A serie Robot AI Vision ontwikkeld. De 3D camera maakt razendsnel een beeld van het object, dat willekeurig wordt aangevoerd a bijvoorbeeld een transportband. Met machine Learning algoritmen wordt de vorm van het product herkend, zodat de cobot automatisch de grijper goed positioneert om het product op te pakken. In een productieomgeving kan men Bin Picking toepassen bij het beladen van machines.
Algoritmen
De zelflerende algoritmen die dit mogelijk maken, draaien op eigen servers van Hanwha. De 3D camera stuurt de beelden door naar deze servers die binnen milliseconden de juiste informatie terugsturen naar Hanwha’s Rodi-besturing van de cobot. Deze informatie bevat de data om de gripper aan te sturen.
Naadloze integratie
Omdat de HCR-A cobot en het Robot AI Vision systeem van één en hetzelfde bedrijf komen, is een naadloze integratie van de beide systemen gegarandeerd. Dit zorgt voor een korte implementatietijd. De HCR-Advanced serie bestaat uit de HCR-3A, HCR-5A en de HCR-12A cobot.